 I'm
I'm 


Real-Time Object Detection for Humanoid Soccer Robots with YOLO v7
Project Overview:
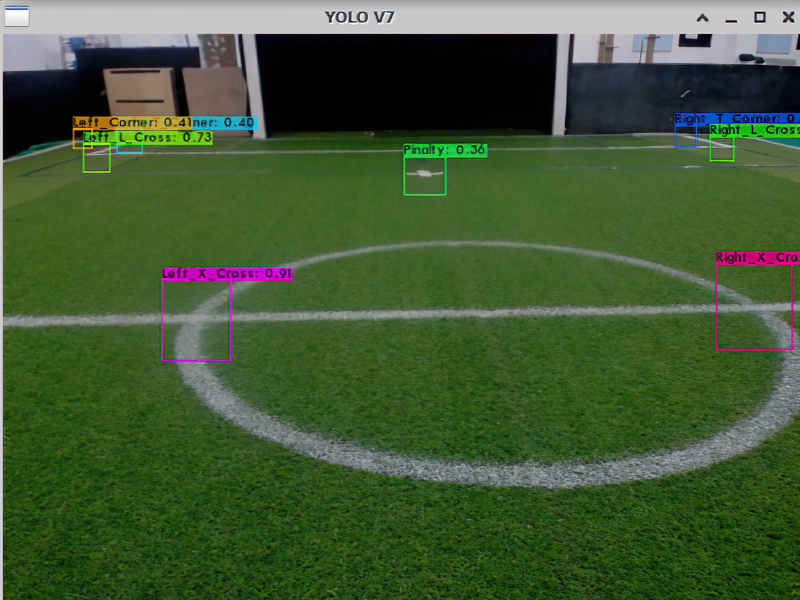
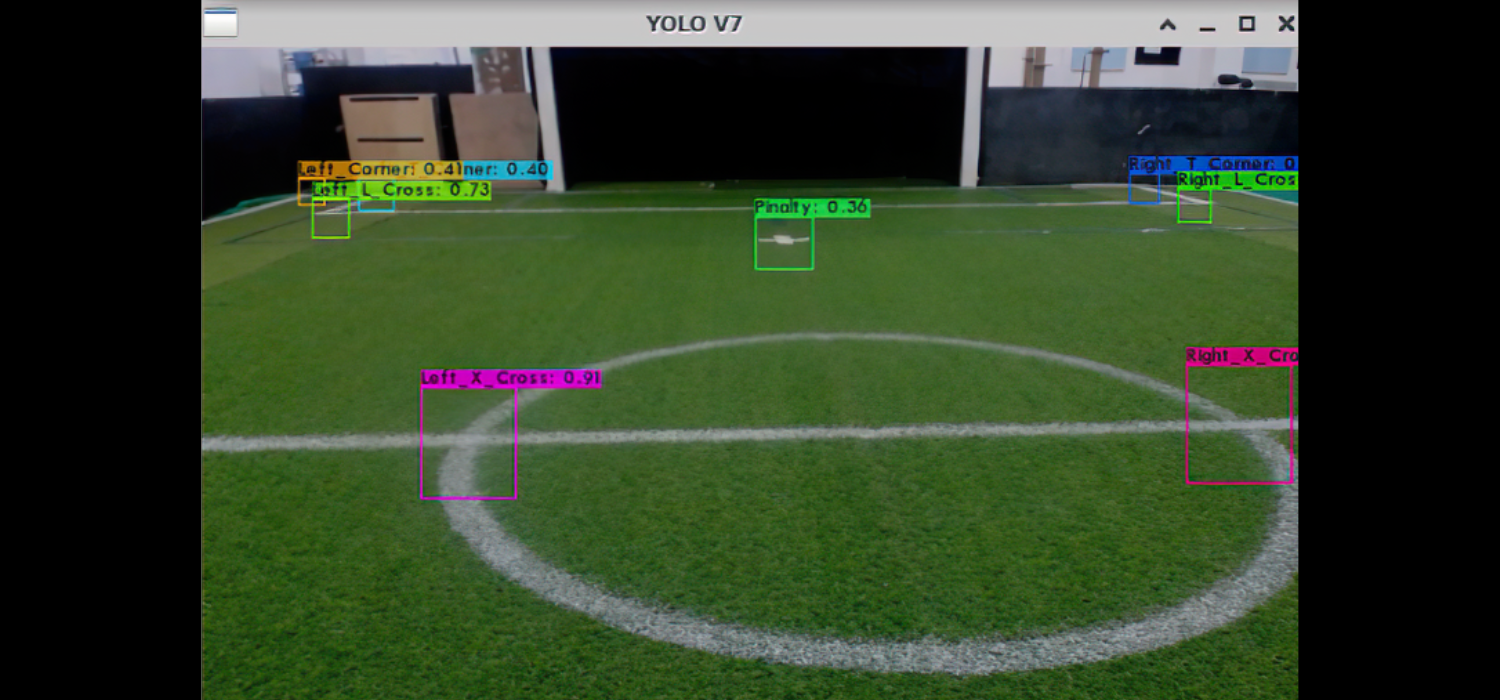
This project integrates the cutting-edge YOLO v7 algorithm within the darknet framework to empower a humanoid soccer robot with the ability to detect soccer balls and field landmarks, including goals, in real time.
Objectives:
The main goal is to create a vision system that can reliably identify and track various objects on the soccer field, facilitating strategic gameplay by the robot.
Methodology:
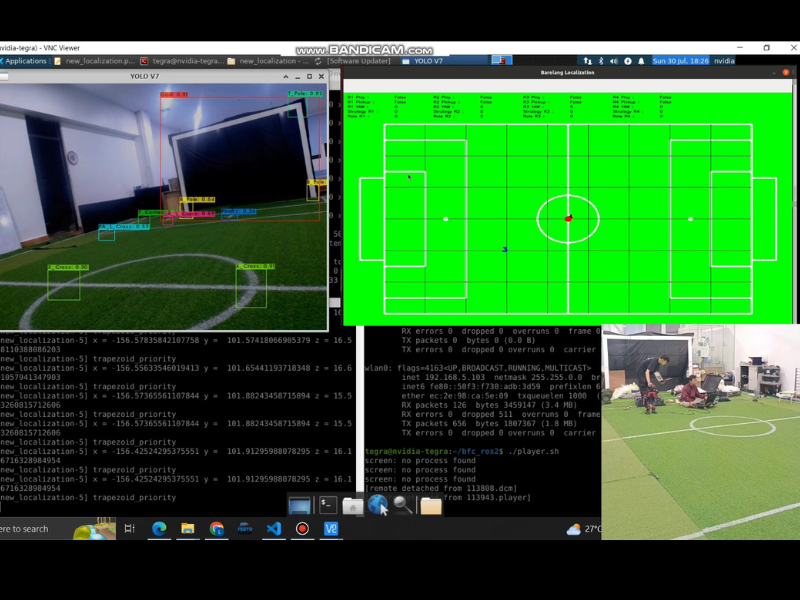
We employed the YOLO v7 for its exceptional speed and accuracy in object detection tasks, using the robot's onboard cameras as input sources. The darknet framework provided the necessary tools and environment to efficiently train and deploy the model.
Outcomes:
The project resulted in a robust detection system that enhanced the robot's interaction with its environment, enabling faster decision-making and effective execution of game strategies.